Новый AI-инструмент оптимизирует дизайн роботов-трансформеров

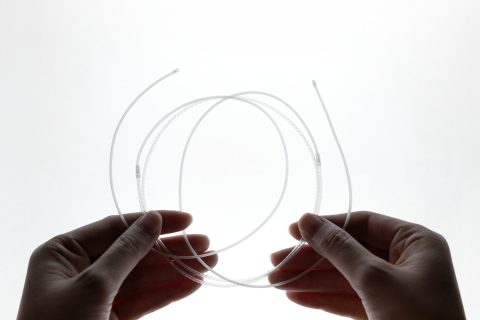
Исследователи из Университета Калифорнии в Беркли разработали новый инструмент, основанный на искусственном интеллекте, который может оптимизировать и автоматизировать проектирование сложных роботов-трансформеров, состоящих из тросов. Эти роботы способны адаптироваться к сложным условиям, изменяя свою форму, что позволяет им выполнять разнообразные задачи.
Процесс проектирования таких роботов усложняется с увеличением количества движущихся частей, что требует более сложных систем управления. Однако новый AI-метод, основанный на генетических алгоритмах, позволяет минимизировать количество управляющих единиц, необходимых для выполнения заданий. Это значительно упрощает процесс проектирования и повышает эффективность управления.
Команда исследователей представила несколько прототипов, включая четырехногого робота и шлем, способный менять форму. Испытания показали, что AI-сгенерированные роботы могут достигать сложных адаптаций формы с минимальным количеством управляющих единиц, что открывает новые возможности для их применения.
Исследователи вдохновлялись биологическими системами, где сложность управляется через координацию групп, а не индивидуальный контроль. Это позволяет им находить оптимальное количество управляющих каналов, обеспечивая при этом высокую производительность.
В будущем команда планирует интегрировать генеративные дизайны, которые смогут автоматически адаптировать формы роботов под конкретные нужды пользователей. Это может привести к созданию нового поколения роботов, функциональность которых будет ограничена только фантазией дизайнеров.
Разработаны новые искусственные мышечные волокна для роботов
Снижение затрат на контрольные точки при помощи Python и NVIDIA nvCOMP
Похожие статьи
Реализация MolmoAct для пространственного reasoning и предсказания действий роботов
Руководство по реализации MolmoAct для пространственного reasoning и предсказания действий роботов.
Разработаны новые искусственные мышечные волокна для роботов
Ученые разработали новые искусственные мышечные волокна для роботов.

Как работают модели визуально-языкового действия (VLA) для роботов
Модели VLA позволяют роботам понимать мир и выполнять сложные задачи, используя обучение и имитацию.